


在美国加州获得牌照测试自动驾驶的企业,去年年底都被要求交了一份“脱离”报告。这里的“脱离”是指汽车在测试时,无法进入自动驾驶模式或终止自动驾驶模式改由人工控制。虽然不能涵盖所有正在自动驾驶测试的公司,但从加州小组的成绩也可以大致了解全球大梯队的进展。
为了让信息更加直观,车云菌将加州机动车辆管理局(DMV,Department of Motor Vehicles)官网信息汇总了一下。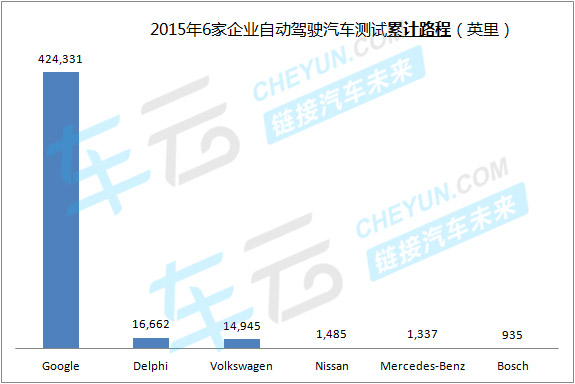
每家自动驾驶汽车都处在里程积累阶段,测试的路程长短直接影响自动驾驶汽车的行驶经验。显而易见的是,谷歌在自动驾驶里程数累积上以压倒性的424331英里(约682895千米)占据排行榜第一。紧接着的是德尔福、大众、日产、梅赛德斯奔驰以及博世。比较特殊的是,特斯拉虽然已经获得了测试牌照,但是这家公司对行驶数据保密,记录在册的脱离的次数仅为0。
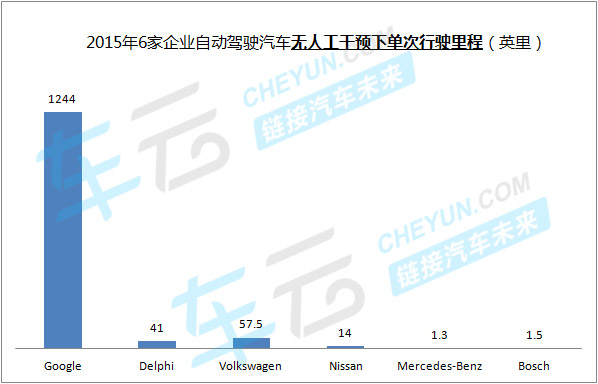
如果将行驶里程和脱离次数相除,可以得到一个无人工干预单次行驶距离的平均值,某种程度上可以反映各家自动驾驶汽车的可靠性。谷歌仍然以1244英里(约2002千米)居于榜首,梅赛德斯奔驰使用自动驾驶模式行驶的距离最短。不过,因为各家测试地点不同,时间、天气等因素也存在差异。比如梅赛德斯奔驰有部分测试在城市内进行,而大众的两部车全在公路自动驾驶。横向比较时要考虑很多原因,所以我们可以挨个看一下各家表现。
谷歌

谷歌自动驾驶测试开启于2009年,一直走的是全自动驾驶路线。2014年5月无人驾驶原型车首次公开,同年12月23日全功能原型车亮相。在2014年12月获得加州自动驾驶牌照之前,谷歌的自动驾驶汽车就已经在旧金山和洛杉矶累计行驶里程。
翻看向DMV递交的报告可以发现,谷歌是六家企业中对“脱离”情况标注最详细的一位。报告里解释了272起事故是因为GPS读取错误、检测到转向或制动功能错误等引起,因此电脑决定人类干预。另外69起案例人类主动接过了方向盘的驾驶权,其中13起是可能引发事故进行的干预。
大众

大众汽车集团为了自动驾驶在内的技术研发,在硅谷成立了一个电子研究实验室(ERL),公司在德国埃拉莱辛(Ehra-Lessien)还寻找了一块自动驾驶试车场,可以在封闭场地模拟公共交通的环境测试车辆。在今年的日内瓦车展上,大众宣布2025年要将可在城市内自动驾驶的产品带向全球市场。
目前大众在加州的所有测试都在公路上进行,路况相对简单。两辆测试车的测试时段分别为2014年9月19日到2015年11月30日,2014年9月29日到2015年1月9日。报告中的车辆在“脱离”时都能报警,“脱离”原因比较抽象,包括车辆基本需要没有满足36次,数据丢失5次,车侧面有运动物体8次,没有接收到规划器数据30次,规划器没有准备好150次,监视器错误31次。
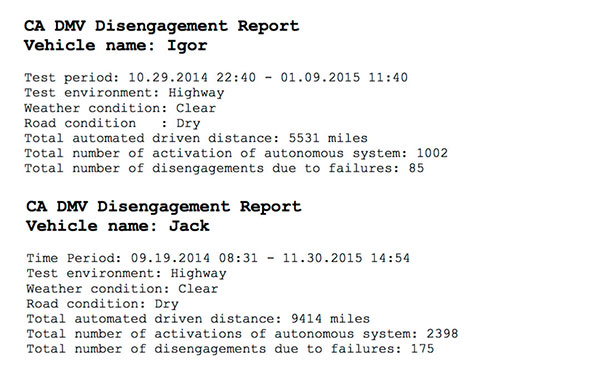
∆大众自动驾驶汽车脱离数据汇总
日产

日产公布的自动驾驶计划分为三个阶段,技术套件用Piloted Drive命名。1.0版本明年日本首发,允许车辆在高速公路上自动驾驶。2018年将推出2.0版,在1.0基础上加入高速自动变道功能。2020年Piloted Drive 3.0可以在城市交通中无人干预实现自动驾驶。
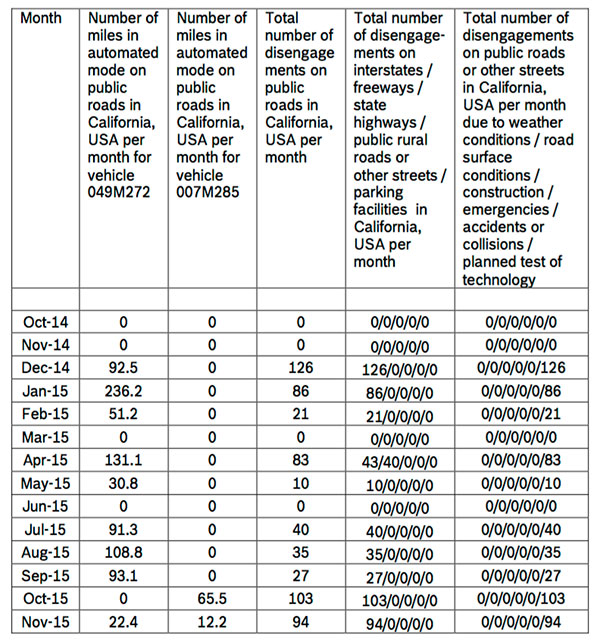
日产报告中挑战的区域大多数是城市街道,其次是在城市公路。报告中车辆遇到状况的反应时间都在1秒内,期间有过一次雨天行驶电脑死机,反应时间长达4秒。需要人类帮忙插手的原因大致为天气、路面情况、建筑施工、紧急情况、事故或碰撞以及因为测试自动驾驶技术本身需要。
∆日产自动驾驶汽车脱离数据汇总
梅赛德斯奔驰
根据戴姆勒在2013年宣布的计划,公司会在2020年之前开始销售自动驾驶汽车。奔驰是与奥迪、谷歌同期获得加州自动驾驶测试车牌的首批企业之一。除了加州牌照之外,戴姆勒2015年还在内华达州开始测试两款自动驾驶卡车,今年1月又有3辆奔驰E级在内华达获得了自动驾驶标准生产汽车的牌照。
奔驰报告里的测试时间历经2014年9月到2015年11月。目前获得牌照的车有5辆,其中3辆在试验场测试,真正上路的只有两辆。测试中汽车自己判断的“脱离”为471起,反应时间都在1秒左右,人类主动介入的情况有496起。报告关于原因的解释特别含糊,主要为司机不舒服、技术评估管理、道路施工等,并不能反应太多系统可靠性。
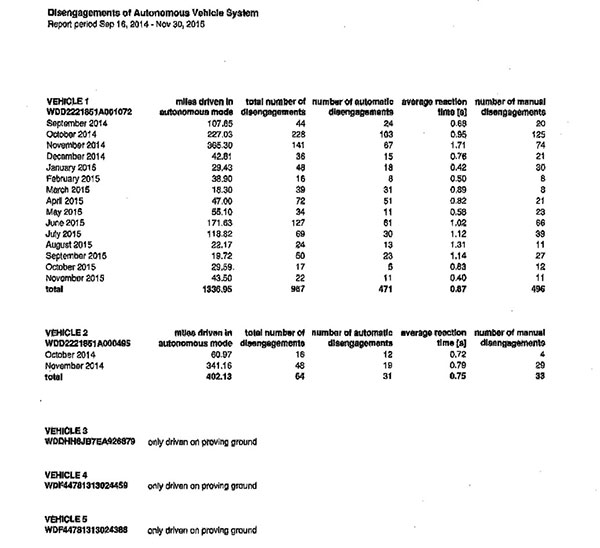
∆奔驰自动驾驶汽车脱离数据汇总
德尔福

作为一家零部件供应商,德尔福配合着车企2020年自动驾驶普及的计划在储备技术。除了加州的测试之外,去年纽约车展的时候,德尔福就将一辆自动驾驶汽车从旧金山开到了纽约,全程约3500英里。
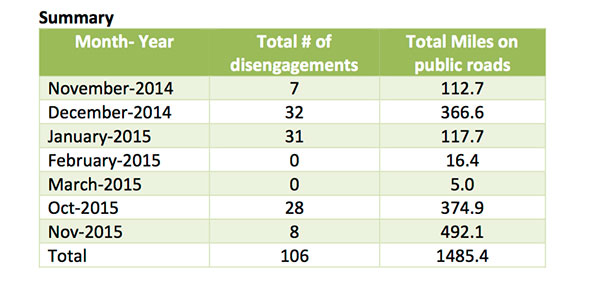
在“脱离”报告中,德尔福的测试时间跨度从2014年10月7日到2015年11月30日,两辆自动驾驶车均为奥迪SQ5。在德尔福发生的16662次“脱离”中,街道场景占了大多数,其次是十字路口和公路情况。排在原因头两位的是车道线模糊110次,检测信号灯102次,其它依次为系统调试和校准62次,拥堵交通时的变道50次,行人很多的情况下防御性介入22次,其他司机的意外行动21次,施工区域17次,停车失败8次,救护车相关7次,以及为自行车挪位置时防御性介入6次。
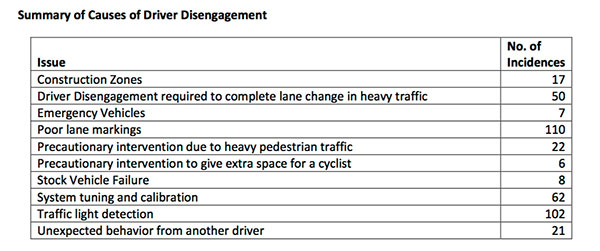 ∆德尔福自动驾驶汽车脱离原因汇总
∆德尔福自动驾驶汽车脱离原因汇总
博世
博世在2011年就开始讨论自动驾驶技术,加州帕洛阿尔托技术中心附近一直有自动驾驶车辆测试。同样,这家零部件公司的自动驾驶技术发展路线也是渐进式,由半自动驾驶向高度自动驾驶、全自动驾驶过渡。
博世报告涉及的测试时间从2014年12月14日起,至2015年11月15日止,其中只有40起“脱离”发生在高速公路,其余都在城市十字路口。博世觉得“脱离”模式很难界定,因此原因写的比较模糊,都是测试自动驾驶技术本身需要。
 ∆博世自动驾驶汽车脱离原因汇总
∆博世自动驾驶汽车脱离原因汇总
车云小结
从各家报告来看,在持续积累里程数的企业并不多,或许是出于保密等因素,一些报告中原因解释的部分并不详实。虽然看起来谷歌在里程上有压倒性的优势,但测试环境因素复杂、标准也不统一,而且总体数据量并不够大,给人更多的感觉还是各家在齐头并进,谁也没有取得绝对的领先。
各家自动驾驶汽车在交互系统的表现都还不错,可以在较短的时间警报大多数的“脱离”情况。一些脱离情况的细节可以看出,自动驾驶面临的挑战仍然是从高速路开进城市。在十字路口、交通信号灯以及人流密集处,自动驾驶汽车仍然无法处理得得心应手。另外结合DMV官网上的事故报告,包括谷歌近期与公交车发生的那起事故也在警示我们,自动驾驶汽车在复杂交通环境中的行驶还需要更多突破。














评论
() 先登录 发表暂无评论
点击展开更多评论